 设为首页
设为首页 加入收藏
加入收藏首页 > 科技成果推介 > 科技成果简介 > 机器人类
仿真机器人(产品)
来源: 北京理工大学
日期:
2014-06-08
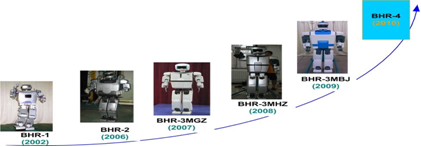
成果简介:仿人机器人是集机构、控制、传感器、电源于一体的高技术集成平台。由北京理工大学研制的“汇童”仿人形机器人首次实现了无外界电缆独立行走,在复杂动作的设计与规划、机器人实时控制及其系统集成等方面处于世界领先水平,可实现太极拳、刀术等复杂武术动作表演。仿人机器人具有广泛的应用领域,特别是作为教育科研平台、科技展示平台、危险作业平台等方面有着潜在的巨大应用前景,对仿人机器人的产业化必将使其形成一个战略性新型产业,并带动相关核心零部件的发展,创造巨大的社会效益和经济效益。近年来北京理工大学在已有自主知识产权的基础上,重点开展了仿人机器人的可靠性及工程化应用研究工作。并已经推出三代“汇童”系列仿人机器人,分别在广东科学中心、浙江省科技馆和中国科技馆展示应用,均被列为重点展项,受到党和国家领导人的极大关注。通过近年来的实际应用反馈情况显示仿人机器人技术成熟、工艺可靠、性能稳定。
项目来源:863计划 技术领域:先进制造业
应用范围:科技展示、科研教育平台、服务机器人、危险作业等。
现状特点:技术成熟,已完成三代机器人的研制,已在实际投入使用。具有技术先进,集成度高的特点。
技术创新:1)仿人形机器人步行的运动规划和复杂动作设计方法;2)建立了基于力觉、加速度计、陀螺仪等传感器的两足稳定步行传感反射控制方法;3)“有效稳定区域”准则;4)系统高度集成技术。
所在阶段:小规模生产
成果知识产权:发明专利申请
成果转让方式:交钥匙工程,合资技术合作
电话:0317-8851134 传真:0317-8851134 邮编:061500 冀ICP备05028085号-2 沧公备:13090002001073
您是本站第123675位来访者