 设为首页
设为首页 加入收藏
加入收藏首页 > 科技成果推介 > 科技成果简介 > 机器人类
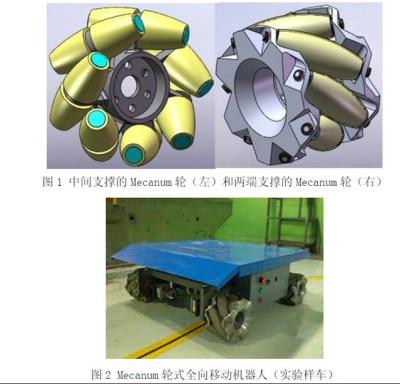
Mecanum轮式全向移动机器人
来源: 东南大学
日期:
2014-05-31
Mecanum 轮式全向移动机器人能够实现平面上的全方位移动,并能够原地零半径转动任意角度,可以在狭窄区域灵活运动,目前已经广泛应用于装配制造业、军事、航空航天、康复医疗等领域。机器人由四个电机分别独立驱动四个Mecanum 轮运动,其中,Mecanum轮是由轮毂和一圈围绕其自由转动的辊子组成,辊子轮廓线为等速螺旋线,通过给定四个Mecanum 轮不同的转速和转向,可以合成平面上不同方向和速度的运动。主要技术为Mecanum 轮、车架和控制系统设计,技术已经较为成熟,经济实用,具有广阔的应用前景。本实验室已经开发出实验样车,并与多家公司有相关合作,成功开发出多种承载吨位的移动搬运机器人。
电话:0317-8851134 传真:0317-8851134 邮编:061500 冀ICP备05028085号-2 沧公备:13090002001073
您是本站第123675位来访者